创博的工业机器人控制软件(NexGRC)为一基于PC-Based控制器架构的纯软件,可透过工业现场总线如EtherCAT来控制伺服驱动器。NexGRC运行于实时操作系统(RTOS),可实时演算并将运动控制命令发送至伺服驱动器,而NexGRC也提供了可于Windows操作系统上运行的调适软件如NexMotion Studio、示教器操作画面如TPUI以及让使用者自行开发的函式库如NexGRC Windows API。
NexGRC 软体架构图
NexGRC软件内建EtherCAT主站功能,可以连接各种不同厂商的EtherCAT从站,同时也支持了多种的标准工业机器人构型如垂直多关节型6轴机器人、Delta机器人与SCARA机器人等,可以透过NexMotion Studio调适软件来设定机器人的构型与相关参数,以及设定需要控制的EtherCAT从站
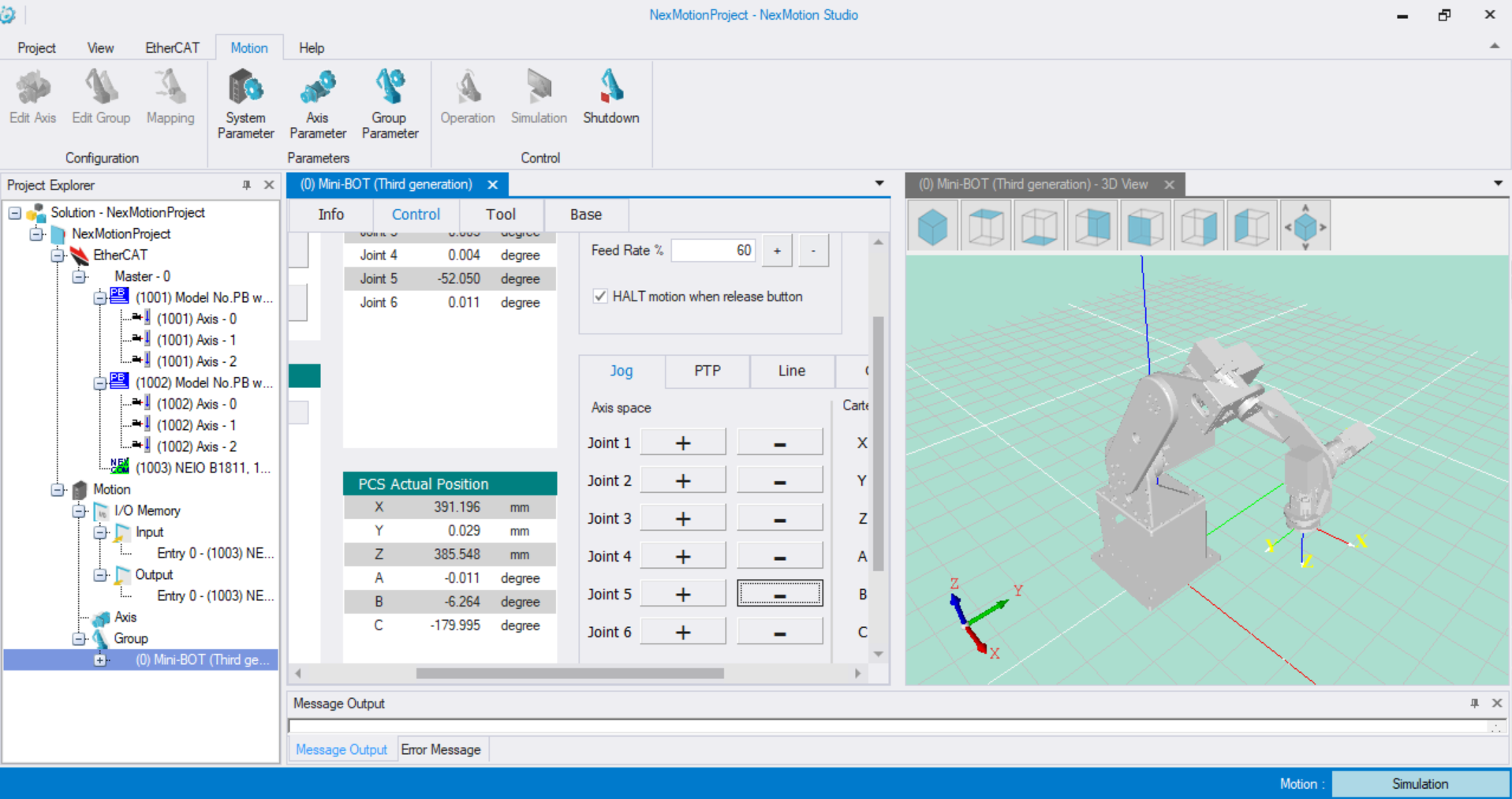
NexMotion Studio软体画面
NexGRC软件内建TPUI功能,提供了多种标准的操作功能可以直接操作机器人移动,针对不同的使用情境设定机器人的移动点位,编写机器人的工作任务等。TPUI提供了NRPL(NexMotion Real-Time Programming Language)的程序语法,是一种基于C语言的标准语法,可以让用户快速撰写实时控制机器人的工作任务。
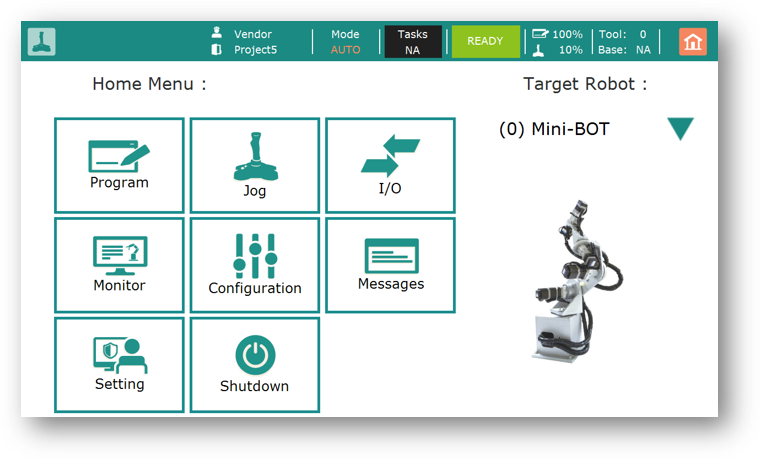
TPUI
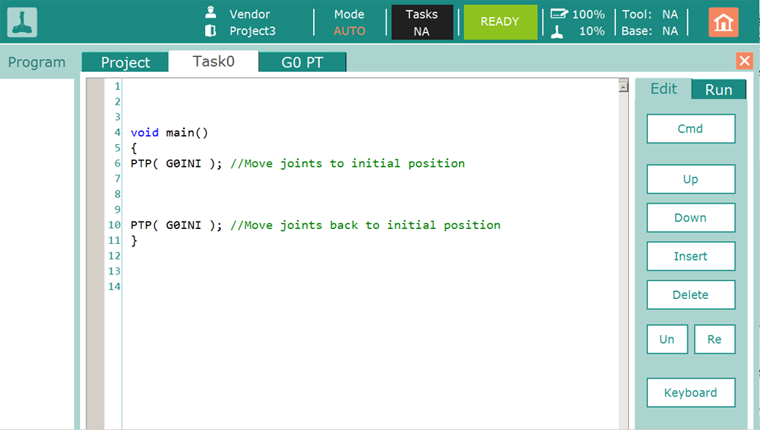
TPUI - NRPL编辑画面
NexGRC中TPUI功能的使用,必须搭配创博提供的标准示教器硬件如TP-100-1与TP-200。示教器产品内包含了触控屏幕可让用户直接操作TPUI,紧急停止开关让使用者可以紧急停止机器人的运动,三段式开关(Enabling switch)可以让使用者在符合ISO 10218-1手动模式下安全的操作机器人。

TP 100-1
对于想要自行设计机器人操作画面的使用者,NexGRC也提供了Windows API让使用者可以自行开发人机接口来控制机器人,例如透过C#或VB.net等语法开发windows form图形化显示接口。
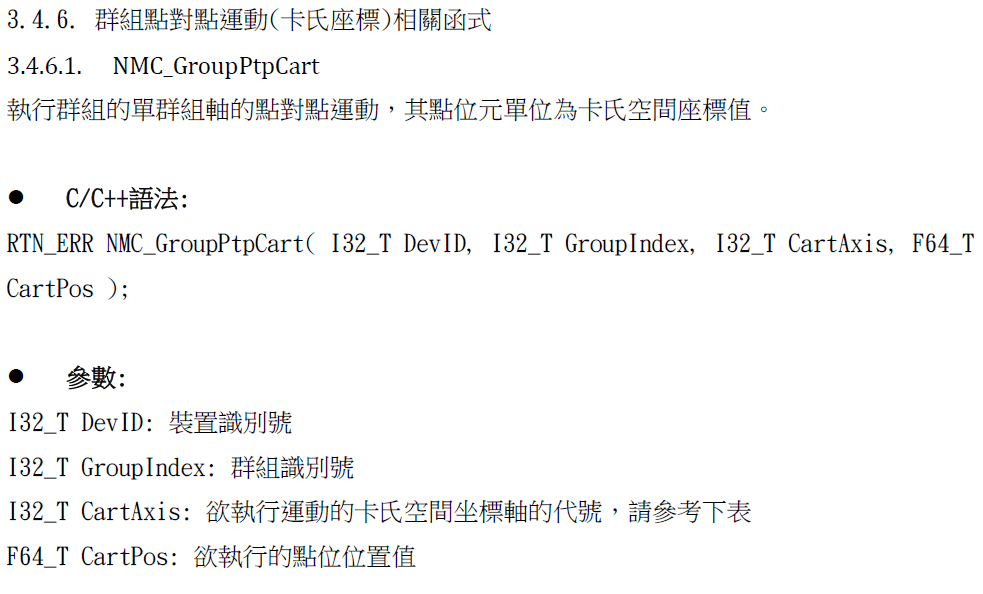
NexGRC Windows API
如上所述,NexGRC软件解决方案提供两种不同的使用情境壤使用者选择如下:
(1) 针对无须开发机器人操作画面的使用者,可使用NexGRC提供的TPUI搭配示教器产品如TP-100-1,可直接透过TPUI上的操作画面直接操作工业机器人
(2) 对于想要自行开发机器操作画面的使用者,则可透过NexGRC Windows API在Windows环境上自行开发机器人操作人机画面。
NexGRC软件解决方案,已经与创博提供的硬件计算机平台完成实时系统的性能测试与稳定性测试。因此,使用者可以直接选购创博整合好的机器人控制器解决方案以确保NexGRC软件运作的实时性能与稳定性能,创博整合好的机器人控制器产品包含了RCB100-SCARA、RCB100-GRC与NET300-GRC。